Маҳсулот
-
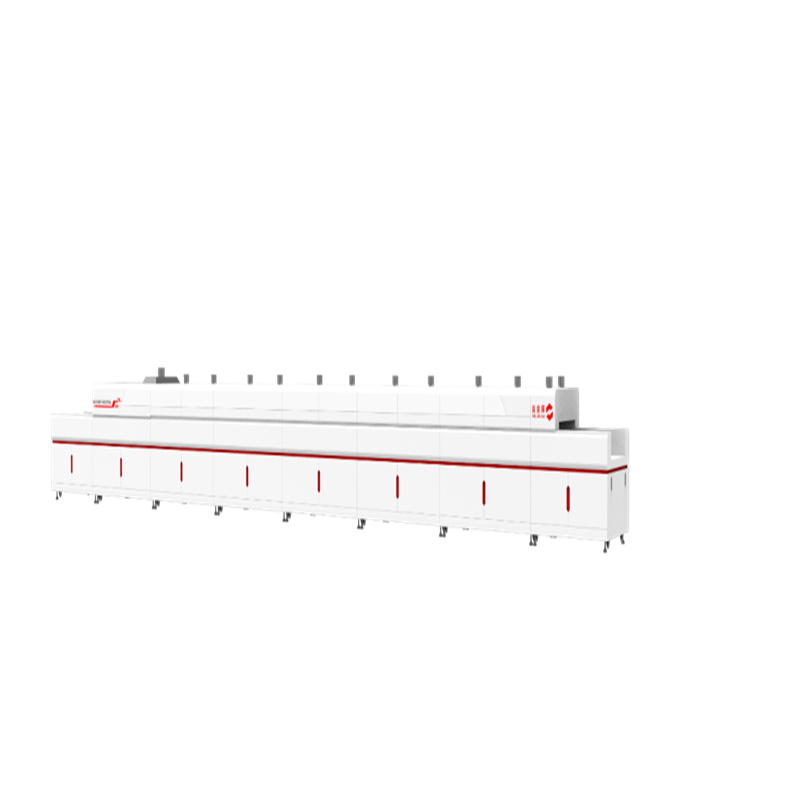
Танӯр хушккунии туннели конвейери навъи ролик
Тавсифи Маҳсулот
Танӯрҳои нақби ҳавои гарми саноатӣ дорои якчанд минтақаҳои гармидиҳии электрикӣ мебошанд, ки ҳароратро ба таври инфиродӣ назорат кардан мумкин аст.Масалан, PCB-ҳо коркард мешаванд
тавассути танӯр ва дар ҳар як минтақа бо суръати назоратшаванда бо интиқоли чархзанӣ ҳаракат кунед.Техникҳо суръати конвейер ва ҳарорати минтақаро барои расидан ба вақти маълум танзим мекунанд
ва профили ҳарорат.Профили истифодашаванда вобаста ба талаботи PCB-ҳои дар айни замон коркардшаванда метавонад фарқ кунад.
Тамоми мошин аз қисмати ғизодиҳӣ, минтақаи хушккунӣ, ки ба системаи патентии тавлидкунандаи энергия, системаи интиқоли ҳаво, системаи нигоҳдории гармӣ ва қисмати борфарорӣ мувофиқат мекунад, иборат аст.Он тарҳи интиқоли ғалтаки патентии воридшаванда, кори устувор ва таъсири хуби сарфакунандаи энергияро қабул мекунад.Муносиб барои тахтаҳои ноҳиявӣ пеш аз пухтан/пас аз пухтан. -

Танӯри хушккунии конвейери туннели капсулшуда
Тавсифи Маҳсулот
Танӯрҳои коркардшудаи саноатӣ дорои якчанд минтақаҳои алоҳидаи тафсоншуда мебошанд, ки метавонанд барои ҳарорат ба таври инфиродӣ назорат карда шаванд. Маводи бастабандии коркардшуда тавассути танӯр ва аз ҳар як минтақа бо суръати назоратшаванда мегузарад.Техникҳо суръати конвейер ва ҳарорати минтақаро барои расидан ба вақти маълум танзим мекунанд
ва профили ҳарорат.Профили истифодашаванда метавонад вобаста ба талаботи маводи бастабандие, ки дар айни замон коркард мешавад, фарқ кунад.
Тамоми мошин аз қисмати ғизодиҳӣ, минтақаи хушккунӣ, ки ба системаи тавлидкунандаи энергияи каммасрафи патентӣ мувофиқ аст, системаи ҳарорати интиқоли ҳаво ва қисмати борфарорӣ иборат аст.Қабули як тарҳи интиқоли дӯкони беназири металлӣ, кори устувор ва таъсири хуби сарфаи энергия.Муносиб барои субстратҳои бастаи пеш аз пухтан/пас аз пухтан. -
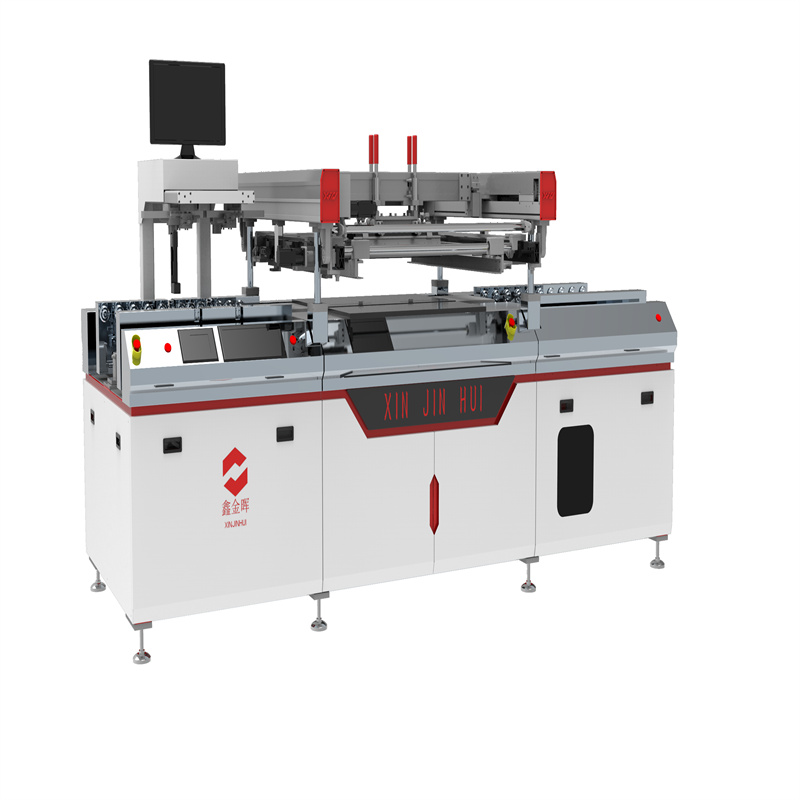
Мошини чопи экрани абрешими интеллектуалии худкор
1, муҳаррики Servo чоп ва пневматикиро хомӯш мекунад, то функсияи синхронии хомӯшро иҷро кунад ва часпидани экранро самаранок пешгирӣ кунад.Моторҳои серво порчаи чопро ба зудӣ ва ҳамвор ҳаракат мекунанд, то ҷойгиршавии дақиқи порчаи чопро таъмин кунанд.
2, Моторҳои серво ва дастури дақиқи роҳи оҳан ҷойгиркунии дақиқ ва мӯҳлати хидматро таъмин мекунанд.Сохтори амудии уфуқии бардорандаи чаҳорчӯбаи чопӣ мувозинат кардани фишори скреперро таъмин мекунад.
3, амалиёти сенсории интерфейси интеллектуалӣ, танзими осон ва намоиши автоматии ошкор кардани хатогиҳо ва ҳалли мушкилот.Фишори чоп ва лавҳаи экранро ба осонӣ ва дақиқ танзим кардан мумкин аст ва кунҷи скреперро мувофиқи хоҳиш танзим кардан мумкин аст.
4,Системаи ҳамоҳангсозии автоматии тасвири CCD, ки дар якҷоягӣ бо платформаҳои чап ва рост кор мекунад, кори тезтар ва дақиқии баландро фароҳам меорад.Коркарди бисёрарзиши системаи тасвир бо ягон графика маҳдуд намешавад ва ҳама гуна графикҳоро ҳамчун ҳадаф истифода бурдан мумкин аст.
-

Мошини сими фишори нимаавтоматӣ
Тамоми мошин қисмати сӯрохи сими системаи пурқуввати худро дорад, ки барои сӯрохи сими часпакии баланд/қатрон мувофиқ аст.Он конфигуратсияи маъруфи сахтафзори барқиро қабул мекунад, бо консепсияҳои пешрафтаи тарроҳӣ ва таносуби устувори сохтори механикӣ муҷаҳҳаз шудааст ва аз ҷониби як қатор технологияҳои патентӣ дастгирӣ карда мешавад.Истедсол ва кори муътадил ва боэътимоди мадсулотро таъмин кунанд.
-

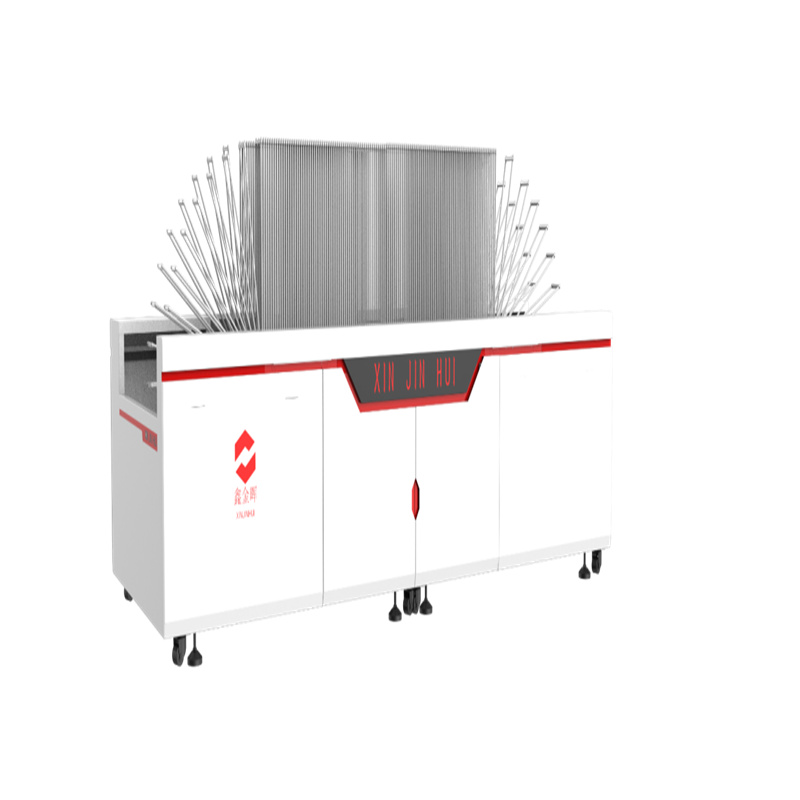
Профили офтобӣ буфери гардиши панел
Тавсифи Маҳсулот
Тамоми мошин аз қисмати боркунӣ, қуттии навъи офтобӣ ва қисмати холӣ иборат аст.Қабули тарҳи интиқоли диски шакли ҳалқаи патентӣ, кори устувор.Он барои гардиши тахтаи ноҳиявӣ, хунуккунӣ ва нигаҳдории муваққатӣ мувофиқ аст. -
Реестри интиқоли уфуқӣ
Тавсифи Маҳсулот
Тамоми мошин аз қисмати боркунӣ, рахи нигаҳдории муваққатӣ ва қисмати борфарорӣ иборат аст.Қабули муомилоти патентии таблиғи патентӣ тарҳрезии интиқол, кори устувор.Муносиб барои нигаҳдории муваққатии платаҳои ноҳиявӣ. -
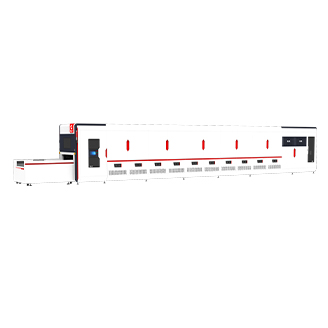
Ҷониби Clip Conveyor туннели танӯр
Тавсифи Маҳсулот
Танӯрҳои конвейерии саноатӣ дорои якчанд минтақаҳои алоҳидаи гармшуда мебошанд, ки ҳароратро ба таври инфиродӣ назорат кардан мумкин аст.PCB-ҳо коркард мешаванд
ба воситаи танур ва дар хар як минтака бо суръати назоратшаванда сафар кунед.Техникҳо суръати конвейер ва ҳарорати минтақаро барои расидан ба вақти маълум танзим мекунанд
ва профили ҳарорат.Профили истифодашаванда вобаста ба талаботи PCB-ҳои дар айни замон коркардшаванда метавонад фарқ кунад.
Тамоми мошин тавассути платформаи ҷойгиркунии автоматӣ бор карда мешавад ва майдони хушккунӣ бо системаи гармидиҳии патентии каммасраф, системаи нақлиёти ҳавоӣ, системаи нигоҳдории гармӣ ва ғизодиҳии автоматӣ мувофиқат мекунад.Он як клипи беназири патентии паҳлӯ, кори устувор ва таъсири хуби сарфакунандаи энергияро қабул мекунад.Он барои тахтаҳои ноҳиявӣ пеш аз нонпазӣ мувофиқ аст./Баъди пухтан. -

Принтери экрани сими фишори интеллектуалӣ
Тавсифи Маҳсулот
Тамоми мошин аз қисмати ҳамоҳангсозии системаи CCD-и комилан интеллектуалӣ иборат аст,
қисмати васлкунӣ бо системаи пурқувваткунанда ва қисмати бозгашти мавод.Чап
ва мизи shuttle рост бармеангезад, ки қисмҳои чоп дар силсилаи дар мобайни.Баланд вохӯрдан мумкин аст
сӯрохи сими часпакии сиёҳ / қатрон. -

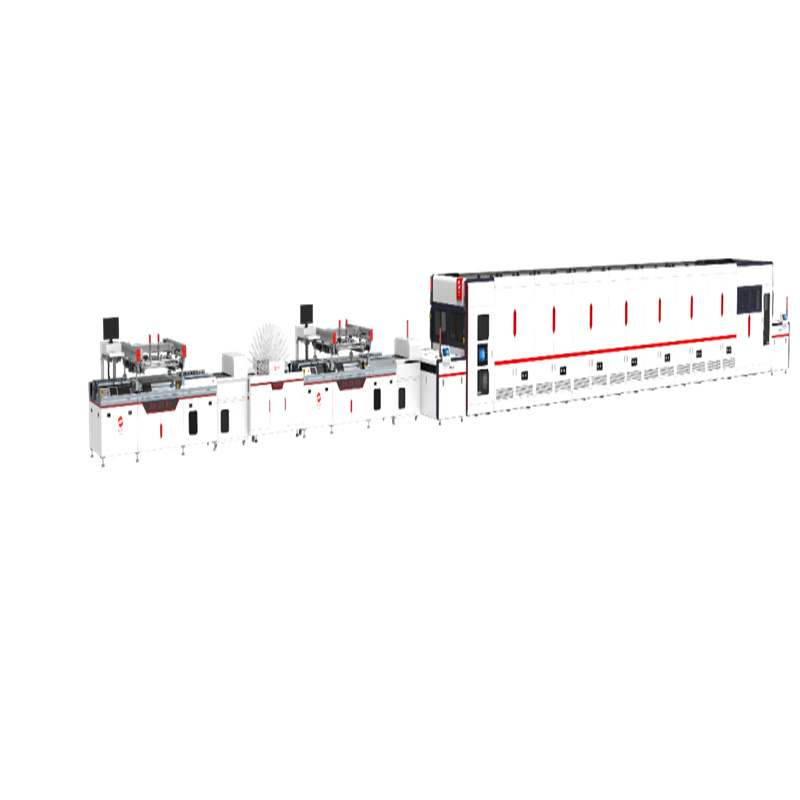
Маскаи пурра худкори кафшери се мошин хати чопро идома медиҳад
Муаррифии маҳсулот:Конфигуратсияи таҷҳизоти хати истеҳсолӣ: васлкунии фишори интеллектуалӣ-тавассути мошин → мошини ҳамворкунии автоматӣ →Принтер экрани ниқоби кафшери интеллектуалӣ → гардиши автоматии ҷойгиркунӣ →Принтер экрани ниқоби кафшери интеллектуалӣ → печи конвейери конвейери паҳлӯ.
Васлкунаки пурраи худкор тавассути хати чопи ниқоби кафшер: он ба раванди чопи экрани экрани ниқоби кафшери PCB аз панелҳои бисёрқабата, тахтаҳои ноҳиявии борик / ғафс татбиқ мешавад.Он конфигуратсияи маъруфи сахтафзори электрикиро қабул мекунад, консепсияҳои пешрафтаи тарроҳӣ, сохтори механикии устуворро дар бар мегирад ва аз ҷониби як қатор технологияҳои патентӣ дастгирӣ карда мешавад.Истедсол ва кори муътадил ва боэътимоди мадсулотро таъмин кунанд. -
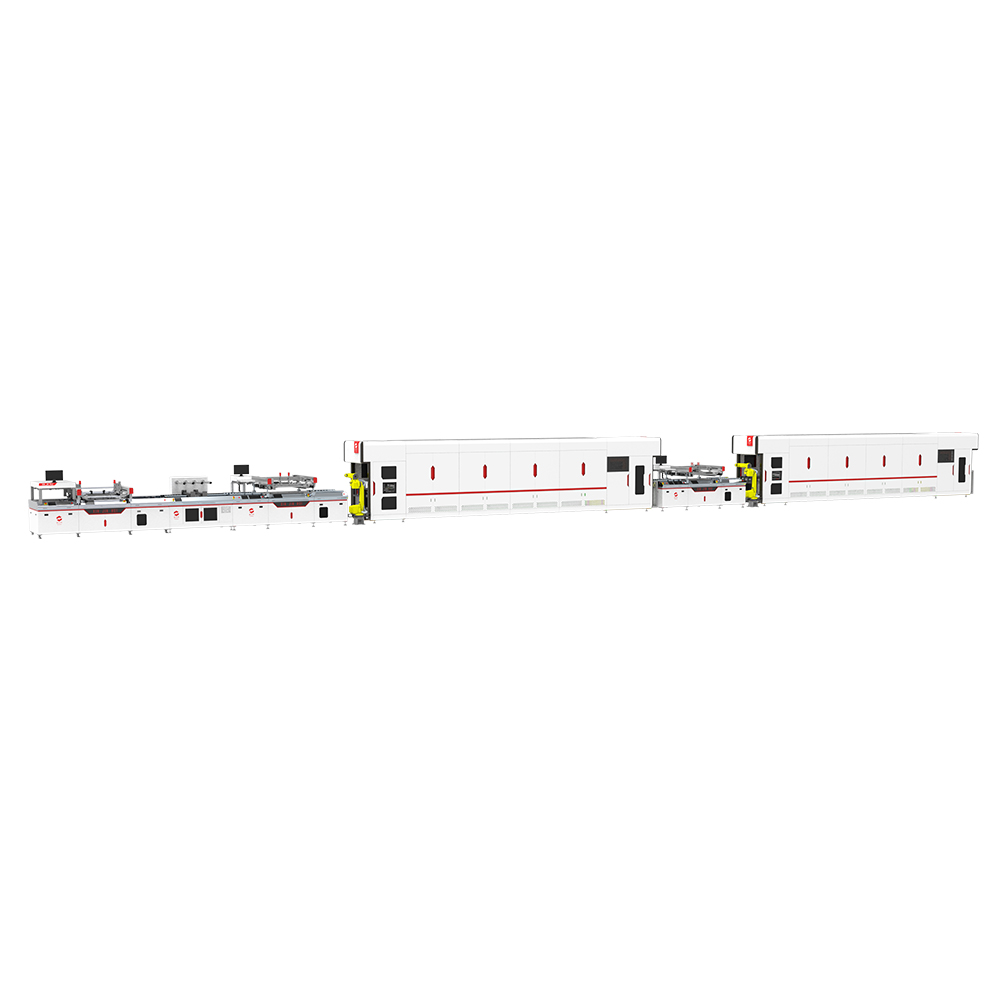
Хатти чопи пурраи худкори варақаҳои лоғар
Муаррифии маҳсулот: Конфигуратсияи таҷҳизоти хати истеҳсолӣ: васлкунии фишори интеллектуалӣ тавассути мошин → мошини ҳамворкунии автоматӣ → Принтери экрани ниқоби кафшери интеллектуалӣ → печи конвейери боздошташуда → Принтери экрани ниқоби кафшери B → печи конвейери боздошташуда
Хатти истеҳсоли ниқоби кафшери пурраи табақи тунуки автоматӣ: он ба раванди истеҳсоли чопи ниқоби кафшери рақамҳои сершумори моддӣ, тахтаҳои ноҳиявии борик / ғафс татбиқ мешавад.Он конфигуратсияи маъруфи сахтафзори электрикиро дар ватан ва хориҷа қабул мекунад, консепсияҳои пешрафтаи тарроҳӣ, сохтори механикии устуворро дар бар мегирад ва аз ҷониби як қатор технологияҳои патентӣ дастгирӣ карда мешавад.Истедсол ва кори муътадил ва боэътимоди мадсулотро таъмин кунанд. -
Хатти чопи экрани афсонаҳои PCB пурра худкор
Муаррифии маҳсулот:Конфигуратсияи таҷҳизоти хатти истеҳсолӣ: Мошини чопи экрани интеллектуалӣ → мошини uv → Мошини чапи шакли офтоб → Принтери экрани интеллектуалӣ → печи конвейери печи. сарфи кувваи кориро кам мекунад, балки инчунин ба максади сарфаи энергия ва кам кардани карбон (аз чопи ду-пажина ва нонпазии ду-бора ба чопи дупаж ва як нонпазй) мерасад.
Хатти пурраи чопи экрани афсонаҳои PCB: он ба раванди истеҳсоли экрани чопи панелҳои бисёрқабата, тахтаҳои тунук / ғафс татбиқ карда мешавад.Он конфигуратсияи маъруфи сахтафзори электрикиро қабул мекунад, консепсияҳои пешрафтаи тарроҳӣ, сохтори механикии устуворро дар бар мегирад ва аз ҷониби як қатор технологияҳои патентӣ дастгирӣ карда мешавад.Истедсол ва кори муътадил ва боэътимоди мадсулотро таъмин кунанд.